Jun. 2026
Reliability-Aware Monocular Depth Supervision for Sparse-View Neural Reconstruction is now available on arXiv.

Robotics & Computer Vision
M.S. in Electrical Engineering, Stanford University
I build robot learning and perception systems that work in the real world — sim-to-real, 3D reconstruction, and real-time vision deployed on robots and vehicles.
Recent updates on papers, research, and more activities.
Reliability-Aware Monocular Depth Supervision for Sparse-View Neural Reconstruction is now available on arXiv.
SimFoundry, Modular and Automated Scene Generation for Policy Learning and Evaluation, is now available on arXiv.
I received the Foxconn Technology Award from the Hon Hai Education Foundation.
Starting in June 2026, I will join Nimble as an AI Robotics Research Intern.
FINS, Efficient Construction of Implicit Surface Models From a Single Image for Motion Generation, was accepted to ICRA 2026 and is now available on arXiv.
I joined the Stanford Vision and Learning Lab (SVL) at Stanford, advised by Prof. Fei-Fei Li.
I began my M.S. in Electrical Engineering at Stanford University, focusing on robotics and computer vision.
🌟 Highlight 🌟
I'm a graduate researcher at the Stanford Vision and Learning Lab, collaborating with NVIDIA GEAR on SimFoundry — a real-to-sim-to-real pipeline for training and evaluating robot manipulation policies. Earlier, I deployed real-time perception models on robots and vehicles at ITRI, and conducted remote research on 3D reconstruction with Prof. Weiming Zhi and Dr. Tianyi Zhang at the DROP Lab, Carnegie Mellon University.

M.S. Student, Electrical Engineering
Concentration: Robotics / Computer Vision

Bachelor of Science in Interdisciplinary Program of Engineering
Concentration: Electrical Engineering / Power Mechanical Engineering

AI Robotics Research Intern
Jun. 2026 - Sep. 2026 (Expected)

Graduate Researcher @ Stanford Vision and Learning Lab
Sep. 2025 - May 2026
I contribute to SimFoundry, a collaboration between the Stanford Vision and Learning Lab and NVIDIA GEAR that builds digital replicas of real-world scenes from video and automatically generates diverse digital cousins to train and evaluate robot manipulation policies. My contributions include building the object cousins asset generation pipeline and a FoundationPose-based ground-truth pose generation pipeline, collecting reconstructed scenes, developing an interactive object-cousins hot-swapping script, and optimizing the object removal algorithm in the scene decomposition step. Policies trained on the generated variations improve real-world success rates by 17-40% on average.

Automotive AI Algorithm Development Intern
Sep. 2024 - Nov. 2024, Mar. 2025 - Jul. 2025
I built a custom semantic segmentation pipeline for robotics and autonomous driving by merging and re-annotating Mapillary and ADE20k, converting the data to COCO format, and training Mask2Former with NVIDIA TAO Toolkit. The final model was deployed in ROS2 and delivered real-time inference at about 15 FPS on robot and vehicle platforms.
I developed a real-time pedestrian detection and re-identification pipeline using YOLO11n, OSNet, and cosine-similarity matching. By exporting models to ONNX and TensorRT for acceleration, the system achieved about 25 FPS and was suitable for robotics and automotive deployment.
I developed a sim-to-real terrain traversal pipeline for the Unitree Go2 that combined Gazebo simulation, RealSense point clouds, and elevation mapping for locomotion over uneven ground. I also integrated point-cloud processing with reinforcement learning gait policies, added VIO and forward kinematics to handle sensor interruptions, and validated the full system on the physical robot.

Technology Innovation Group of Chairman Office Intern
Jun. 2024 - Sep. 2024
I built an Android in-vehicle app for voice-based A/C control, making HVAC adjustment more intuitive for drivers. The end-to-end pipeline connected Azure Speech Service, Dialogflow intent parsing, and CarAPI to execute temperature control commands in the vehicle.
Featured Research
A collaboration between the Stanford Vision and Learning Lab and NVIDIA GEAR, with Prof. Fei-Fei Li, Prof. Yuke Zhu, and colleagues.
SimFoundry builds digital replicas of real-world scenes directly from video and automatically generates diverse digital cousins — scene variations that preserve task-relevant structure — to train and evaluate robot manipulation policies.
Across a range of tasks, simulated performance correlates strongly with real-world results, and policies trained on the generated variations improve real-world success rates by 17-40% on average.
Featured Research
Advised by Dr. Tianyi Zhang, Prof. Matthew Johnson-Roberson, and Prof. Weiming Zhi
We present Fast Image-to-Neural Surface (FINS), a lightweight framework capable of reconstructing high fidelity signed distance fields (SDF) from a single image in 10 seconds.
Our method fuses a multi-resolution hash grid and efficient optimization to achieve state-of-the-art accuracy while being an order of magnitude faster than existing methods.
The scalability and real-world usability of FINS were also tested through robotic surface-following experiments, showing its utility in a wide range of tasks and datasets.
Jun. 2024 - Sep. 2024
Google Hardware Product Sprint (HPS) Program
I developed a smart refrigerator system that combined food recognition, expiration tracking, and recipe recommendation with Google Gemini. The project focused on turning inventory awareness into actionable suggestions, helping users reduce food waste by surfacing recipes based on soon-to-expire ingredients.
Jan. 2023 - Nov. 2023
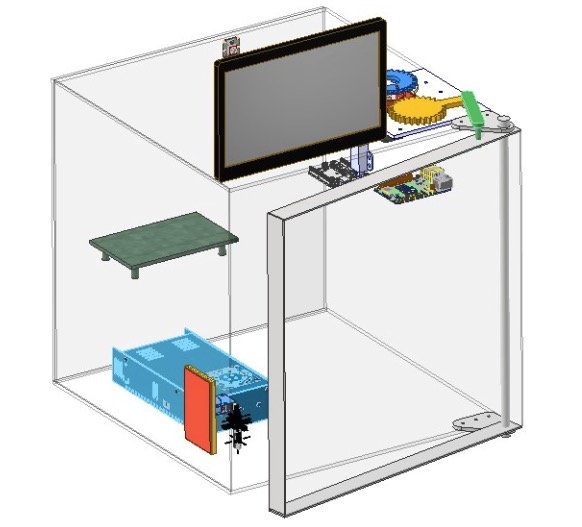
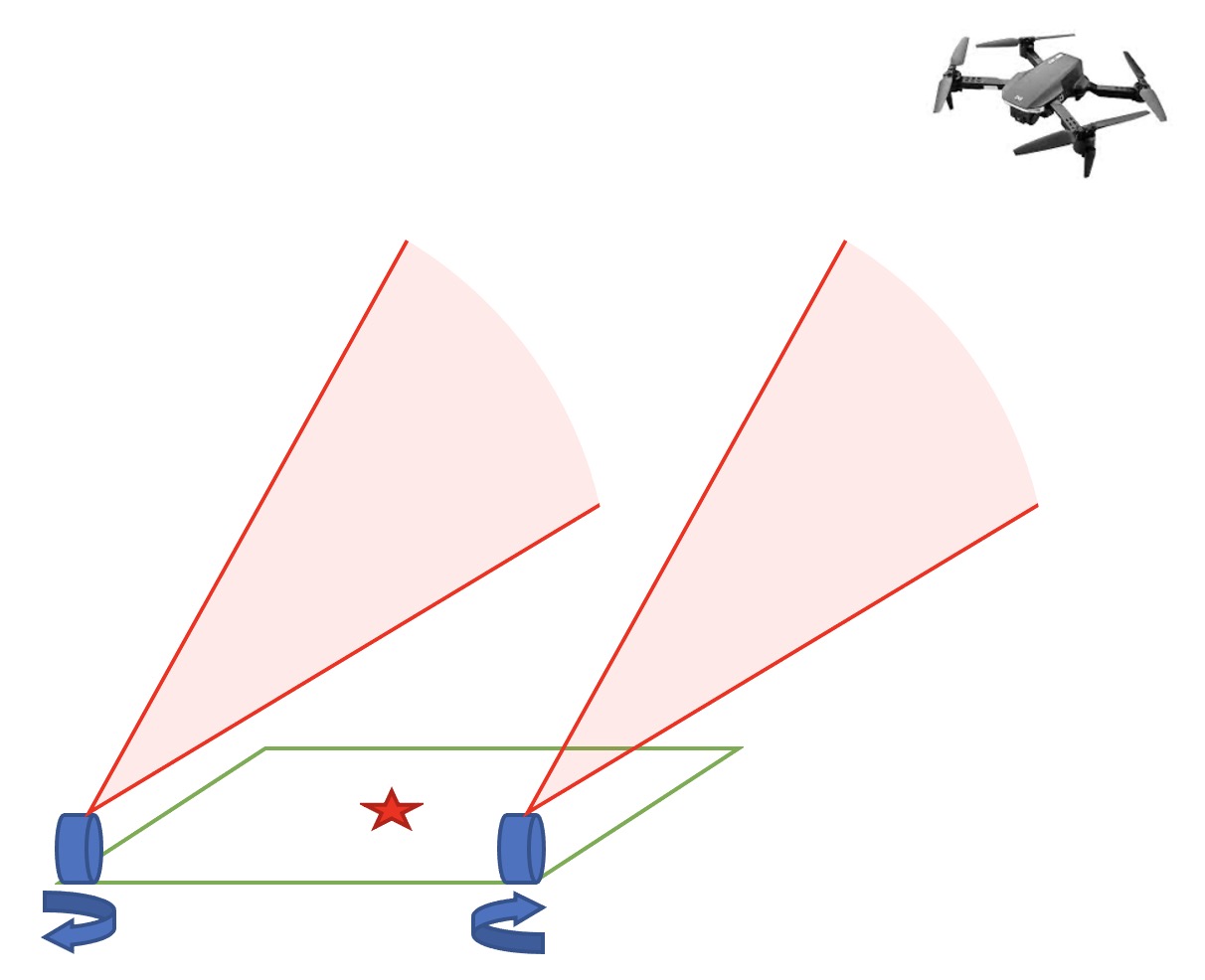
[HSCC Lab], National Tsing Hua University
Advised by Prof. Jang-Ping Sheu.
I developed a laser-assisted landing system to improve drone landing accuracy in settings where GPS can drift by several meters. By combining embedded electronics, 3D-printed mechanical design, and low-power laser sensing, the system achieved 30-40 cm landing accuracy and demonstrated the feasibility of laser-based localization for future UAV platforms.
Jun. 2023 - Aug. 2023
[MURO Lab], UC San Diego
Supervised by Prof. Jorge Cortés.
I built a real-time dynamic obstacle avoidance system for TurtleBot4 using ROS2 and vision-based sensing with an OAK-D Pro camera. The system combined obstacle tracking, RRT* path planning, and Bezier-curve smoothing to achieve reliable and collision-free navigation in dynamic environments using an affordable camera-first setup.
(* Equal contribution, † Corresponding author)
@misc{chu2026reliability,
title = {Reliability-Aware Monocular Depth Supervision for Sparse-View Neural Reconstruction},
author = {Wei-Teng Chu and Yashasvini Gopalan and Changju Yuan},
year = {2026},
eprint = {2607.02554},
archivePrefix = {arXiv},
primaryClass = {cs.CV},
url = {https://arxiv.org/abs/2607.02554},
}
W.-T. Chu, Y. Gopalan, and C. Yuan, "Reliability-Aware Monocular Depth Supervision for Sparse-View Neural Reconstruction," arXiv preprint arXiv:2607.02554, 2026. [Online]. Available: https://doi.org/10.48550/arXiv.2607.02554
@misc{ranawaka2026simfoundry,
title = {SimFoundry: Modular and Automated Scene Generation for Policy Learning and Evaluation},
author = {Nadun Ranawaka and Josiah Wong and Wei-Lin Pai and Wei-Teng Chu and Tianyuan Dai and Masoud Moghani and Hang Yin and Yunfan Jiang and Wesley Durbano and Brandon Huynh and Yu Fang and Linxi Fan and Danfei Xu and Ruohan Zhang and Li Fei-Fei and Bowen Wen and Ajay Mandlekar and Yuke Zhu},
year = {2026},
eprint = {2606.28276},
archivePrefix = {arXiv},
primaryClass = {cs.RO},
url = {https://arxiv.org/abs/2606.28276},
}
N. Ranawaka, J. Wong, W.-L. Pai, W.-T. Chu, et al., "SimFoundry: Modular and Automated Scene Generation for Policy Learning and Evaluation," arXiv preprint arXiv:2606.28276, 2026. [Online]. Available: https://doi.org/10.48550/arXiv.2606.28276
@misc{chu2025fins,
title = {Efficient Construction of Implicit Surface Models From a Single Image for Motion Generation},
author = {Wei-Teng Chu and Tianyi Zhang and Matthew Johnson-Roberson and Weiming Zhi},
year = {2025},
eprint = {2509.20681},
archivePrefix = {arXiv},
primaryClass = {cs.RO},
url = {https://arxiv.org/abs/2509.20681},
}
W.-T. Chu, T. Zhang, M. Johnson-Roberson, and W. Zhi, "Efficient Construction of Implicit Surface Models From a Single Image for Motion Generation," arXiv preprint arXiv:2509.20681, 2025. [Online]. Available: https://doi.org/10.48550/arXiv.2509.20681
@INPROCEEDINGS{kuo2024laserlanding,
author = {Kuo, Yung-Ching and Chu, Wei-Teng and Cho, Yu-Po and Sheu, Jang-Ping},
booktitle = {2024 IEEE 21st International Conference on Mobile Ad-Hoc and Smart Systems (MASS)},
title = {Laser-Assisted Guidance Landing Technology for Drones},
year = {2024},
pages = {670-675},
doi = {10.1109/MASS62177.2024.00107}
}
Y. -C. Kuo, W. -T. Chu, Y. -P. Cho and J. -P. Sheu, "Laser-Assisted Guidance Landing Technology for Drones," 2024 IEEE 21st International Conference on Mobile Ad-Hoc and Smart Systems (MASS), Seoul, Korea, Republic of, 2024, pp. 670-675. doi: 10.1109/MASS62177.2024.00107
@InProceedings{chu2024dynamicobstacles,
author = "Chu, Wei-Teng",
editor = "Mo, John P. T.",
title = "Dodging Dynamical Obstacles Using Turtlebot4 Camera Feed",
booktitle = "Proceedings of the 10th International Conference on Mechanical, Automotive and Materials Engineering",
year = "2024",
publisher = "Springer Nature Singapore",
pages = "195--204",
isbn = "978-981-97-4806-8"
}
Chu, WT. (2024). Dodging Dynamical Obstacles Using Turtlebot4 Camera Feed. In: Mo, J.P.T. (eds) Proceedings of the 10th International Conference on Mechanical, Automotive and Materials Engineering. CMAME 2023. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-97-4806-8_17